Benchmarks¶
Assumption that the contribution of an element can be represented by a single dipole “far” away from source (see Governing equations).
Shape / orientation of the magnetic field outside source body, verifying rotation of vector components in translation from original
facmagFORTRAN77 subroutine [Blakely, 1995], to current function embedded in MTE.Assumption that volume elements are small enough and distance to
Pis large enough (see Computational approach).Solving spatial problem with introduction of a small distance (\(\epsilon\)) suffices.
support.compute_analytical_solution(). All benchmarks outlined here do not require modification of the z-coordinate of nodes on the top and bottom surfaces and, consequently, do not call for a setup with additional triangles (see Computational approach). Therefore, unless otherwise specified, the function magnetostatics.compute_B_surface_integral_cuboid() computes the contribution of each element to the magnetic field strength \(\mathbf{B}\) for all benchmarks.Benchmark 1: a single dipole¶
Analytical solution¶
Model setup¶
Results¶
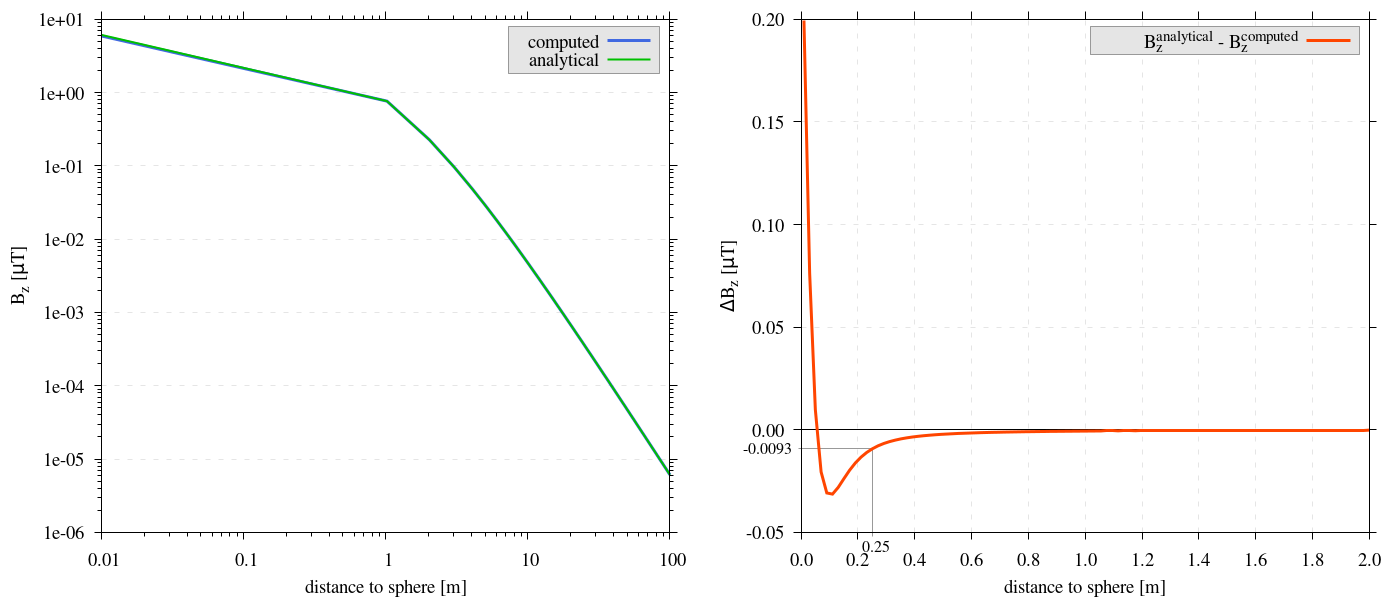
Figure 2 On the left, analytical solution for a single dipole and computed values at increasing distance from surface of a sphere. On the right, the difference between analytical solution for a single dipole and computed values at increasing distance from surface of a sphere. Both show an excellent match of the computed and analytical values, even at close proximity to the surface. At \(0.25m\) the error remains approximately \(\sim \lvert 0.01 \rvert \mu T\).¶
Reproduce¶
Steps to reproduce the results and figures
Please note basic setup in Installation
In
MTE.py, modify benchmark attribution to1:49benchmark = '1'Run “zoomed” setup & rename/move files
88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116
if benchmark == '1': # General settings remove_zerotopo = False compute_analytical = True do_spiral_measurements = False do_path_measurements = False # Domain settings Lx, Ly, Lz = 2, 2, 2 # Length of the domain in each direction. nelx, nely, nelz = 100, 100, 100 # Amount of elements in each direction. Mx0, My0, Mz0 = 0, 0, 7.5 # Magnetization [A/m], do not change Mx0 and My0. # Sphere settings sphere_R = 1 # Radius of the sphere. sphere_xc, sphere_yc, sphere_zc = Lx / 2, Ly / 2, -Lz / 2 # Center position of the sphere. # Line measurement settings do_line_measurements = True # Do computations along a observation line (path). line_nmeas = 100 # Amount of observation points. xstart, xend = Lx / 2, Lx / 2 # x-coordinates of start and end of observation path. ystart, yend = Ly / 2, Ly / 2 # y-coordinates "". zstart, zend = 0.01, 2 # Zoomed setup. #zstart, zend = 0.01, 100 # Non-zoomed setup. # Plane measurement settings do_plane_measurements = False # Do computations on a observation plane. plane_nnx, plane_nny = 3, 3 # Amount of observation points in each direction. plane_x0, plane_y0, plane_z0 = -Lx / 2, -Ly / 2, 1 plane_Lx, plane_Ly = 2 * Lx, 2 * Ly # Length of observation plane in each direction.
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_1/results_zoom && mv log.txt *.vtu *.ascii $_
Run regular setup & move files
104 105 106 107 108 109 110
# Line measurement settings do_line_measurements = True # Do computations along a observation line (path). line_nmeas = 100 # Amount of observation points. xstart, xend = Lx / 2, Lx / 2 # x-coordinates of start and end of observation path. ystart, yend = Ly / 2, Ly / 2 # y-coordinates "". #zstart, zend = 0.01, 2 # Zoomed setup. zstart, zend = 0.01, 100 # Non-zoomed setup.
python3 -u MTE.py | tee log.txt
mv log.txt *.vtu *.ascii benchmarks/benchmark_1/
Go to directory & plot
cd benchmarks/benchmark_1
gnuplot plot_script_B1.p
python3 plot_script_B1.py
Benchmark 2: internal cancellation¶
Analytical solution¶
Model setup¶
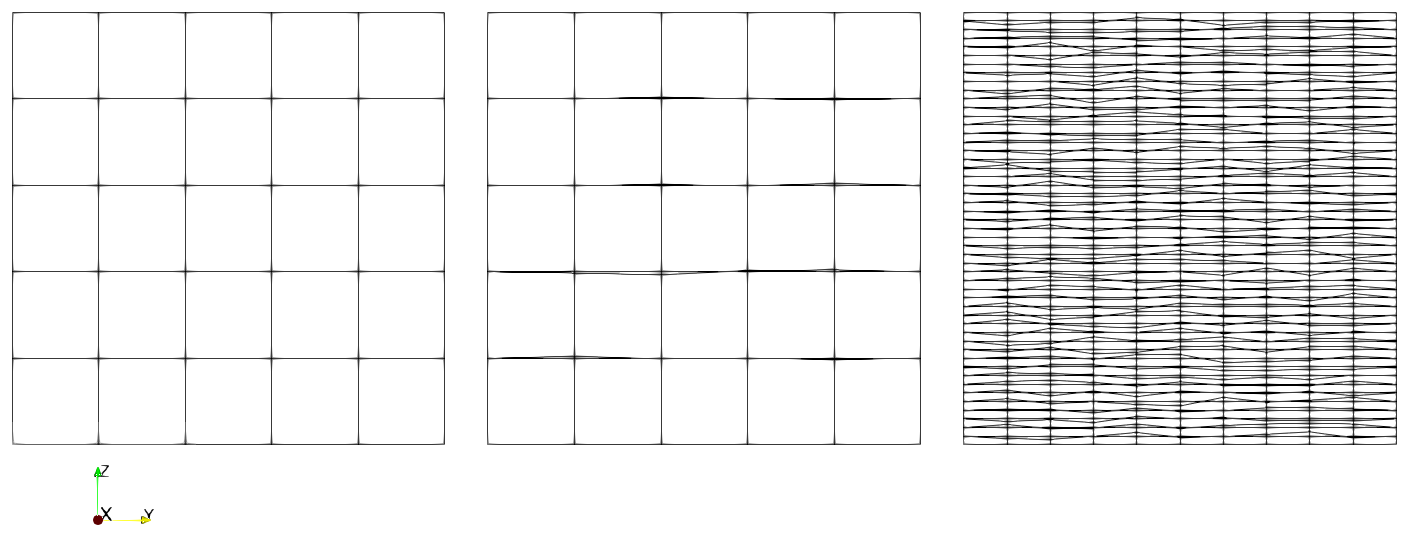
Figure 3 Visualization of different model setups by cross sectional (z-y) planes trough middle of each domain. On the left the undeformed base domain, in the middle deformation setup (1), where perturbations within a range of \([-0.1:0.1m]\) are introduced to the z-coordinates of the internal nodes of the domain. On the right deformation setup (2), where the same perturbations are repeated, additionally, the aspect ratio of elements are increased.¶
A random value between \(-0.1\) and \(0.1m\) is added to the z coordinates of internal nodes.
In addition to situation (1), the aspect ratio of elements is significantly increased, with each element’s dimension now \(5\times1\times0.2m\).
Results¶
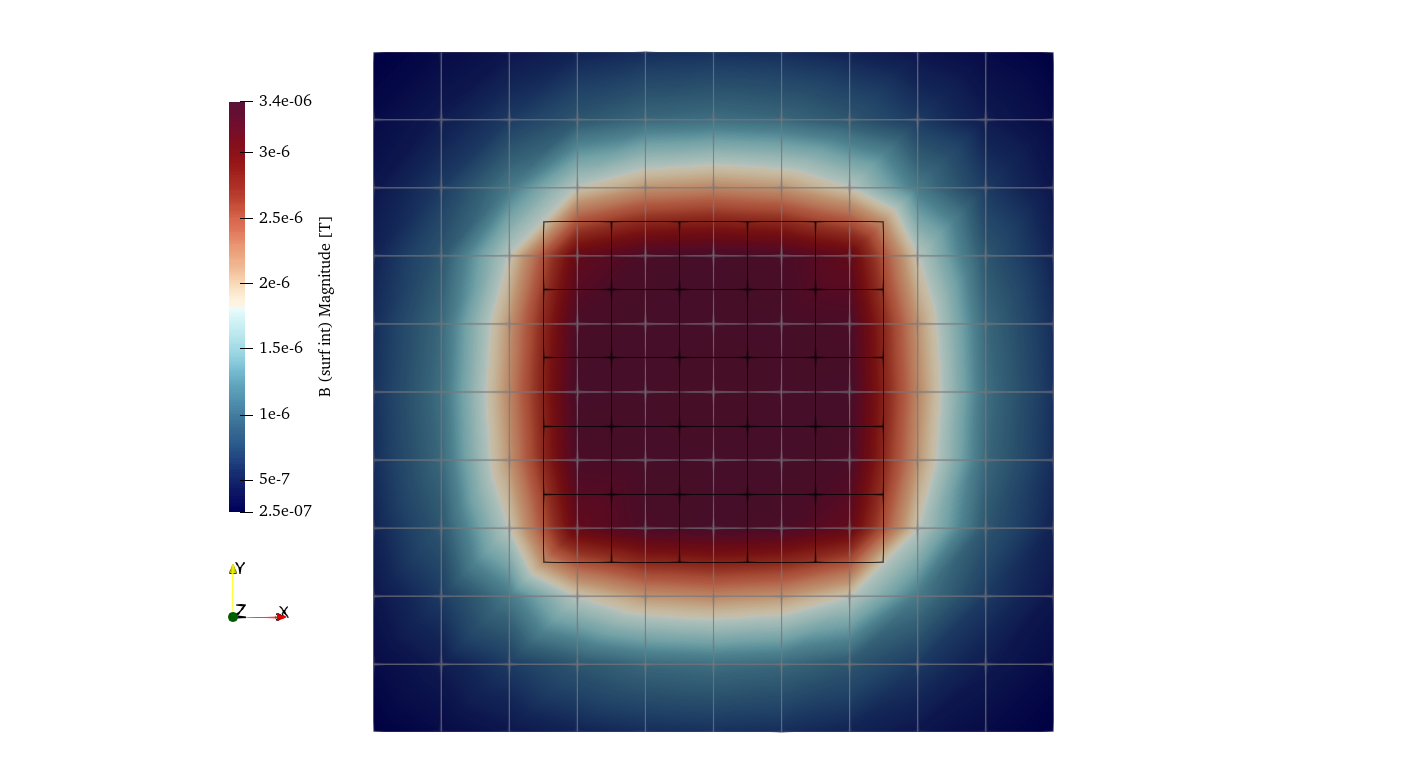
Figure 4 The magnetic field strength \(\mathbf{B}\) on a plane \(1m\) above the surface of a box with a spatial extent that is twice as large as the (undeformed) domain beneath. Black lines denote the domain edges, while the grey lines connect the observation points on the plane. The observed pattern reveals the extent of the magnetization of the cuboid domain, rapidly decreasing with distance from the domain. These results provided the base for further testing in this benchmark.¶
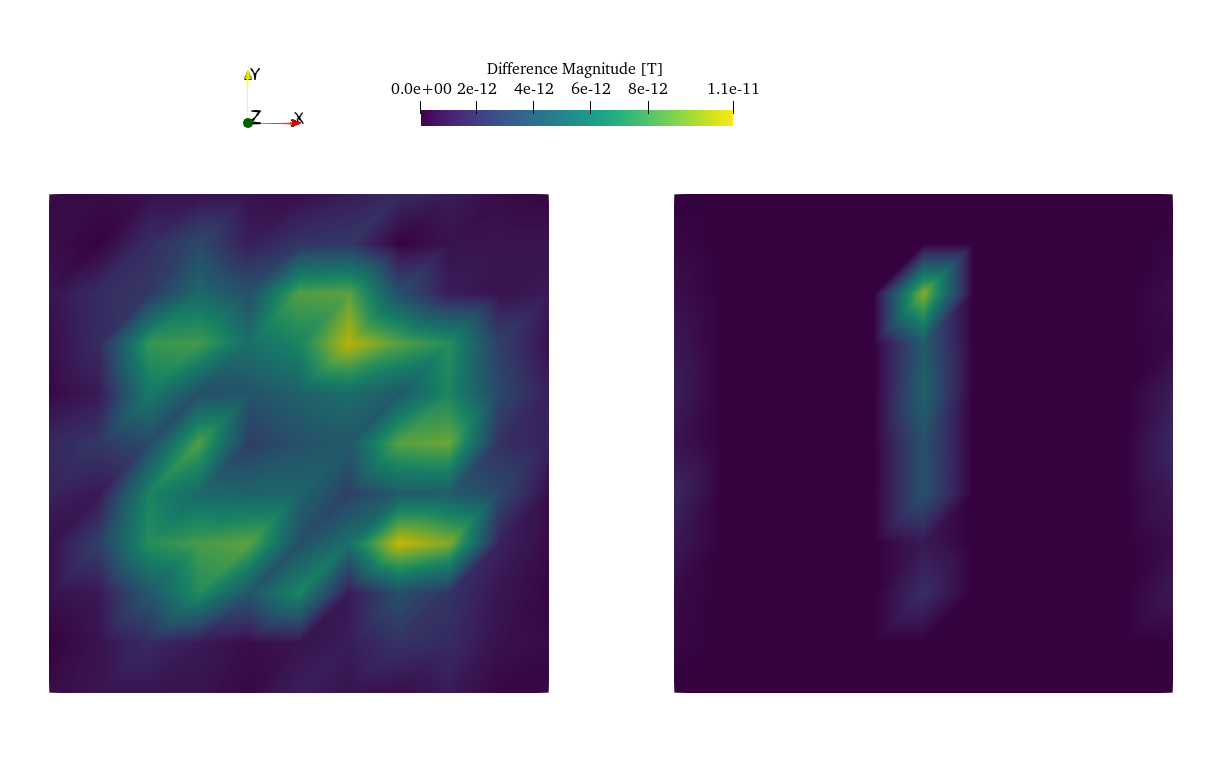
Figure 5 Difference between Figure 4 and results from the deformed domain setups. The left side depicts the variance between deformation setup (1) and the base, while the right side shows the difference of deformation setup (2) relative to the base. Notably, the errors in both deformation setups are minimal.¶
Reproduce¶
Steps to reproduce the results and figures
Please note basic setup in Installation
In
MTE.py, modify benchmark attribution to2a:49benchmark = '2a'Run base setup & rename/move files
120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143
if benchmark == '2a': # General settings remove_zerotopo = False compute_analytical = False do_spiral_measurements = False do_path_measurements = False # Domain settings Lx, Ly, Lz = 10, 10, 10 nelx, nely, nelz = 5, 5, 5 Mx0, My0, Mz0 = 0, 0, 7.5 # Magnetization [A/m]. # Plane measurement settings do_plane_measurements = True plane_nnx, plane_nny = 11, 11 plane_x0, plane_y0, plane_z0 = -Lx / 2, -Ly / 2, 1 plane_Lx, plane_Ly = 2 * Lx, 2 * Ly # Line measurement settings do_line_measurements = False line_nmeas = 47 xstart, xend = 0.23 + ((Lx - 50) / 2), 49.19 + ((Ly - 50) / 2) ystart, yend = Ly / 2 - 0.221, Ly / 2 - 0.221 zstart, zend = 1, 1 # 1m above surface.
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_2/d0 && mv log.txt *.vtu *.ascii $_
In
MTE.py, modify benchmark attribution to2b:49benchmark = '2b'Run deformation setup (1) & move files
147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166
if benchmark == '2b': # General settings remove_zerotopo = False compute_analytical = False do_spiral_measurements = False do_path_measurements = False do_line_measurements = False # Domain settings Lx, Ly, Lz = 10, 10, 10 nelx, nely, nelz = 5, 5, 5 #nelx, nely, nelz = 2, 10, 50 Mx0, My0, Mz0 = 0, 0, 7.5 dz = 0.1 # Amplitude random for perturbations in domain. # Plane measurement settings do_plane_measurements = True plane_nnx, plane_nny = 11, 11 plane_x0, plane_y0, plane_z0 = -Lx / 2, -Ly / 2, 1 plane_Lx, plane_Ly = 2 * Lx, 2 * Ly
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_2/d0_1 && mv log.txt *.vtu *.ascii $_
Run deformation setup (2) & move files
155 156 157 158 159 160
# Domain settings Lx, Ly, Lz = 10, 10, 10 #nelx, nely, nelz = 5, 5, 5 nelx, nely, nelz = 2, 10, 50 Mx0, My0, Mz0 = 0, 0, 7.5 dz = 0.1 # Amplitude random for perturbations in domain.
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_2/d0_1_2_10_50 && mv log.txt *.vtu *.ascii $_
Go to directory & use paraview or plotting to visualize
cd benchmarks/benchmark_2
paraview --state=plot_result_b2_final.pvsm
gnuplot plot_script_B2.p
python3 plot_script_B2.py
Benchmark 3: a magnetized sphere¶
Analytical solution¶
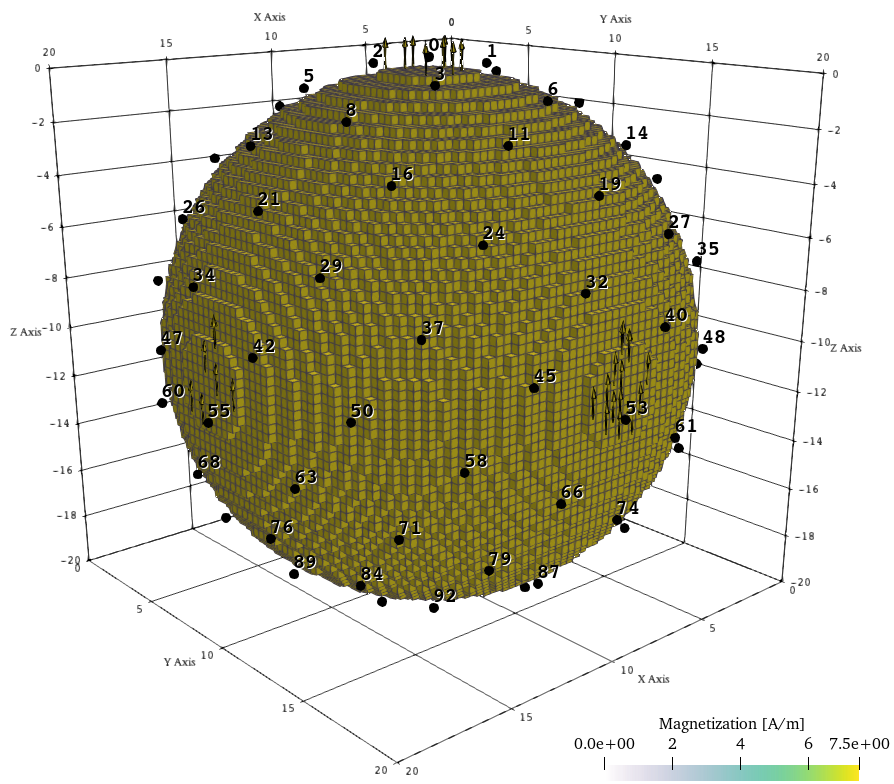
Figure 6 Visualization of the model setup with numbering along Fibonacci spiral for uniform distribution above the tessellated sphere. The numbering sequence begins at the top of the sphere and proceeds downward in a counterclockwise spiral. The magnetization is assigned to any elements within the spherical domain, and aligned with the z-axis.¶
Model setup¶
Results¶
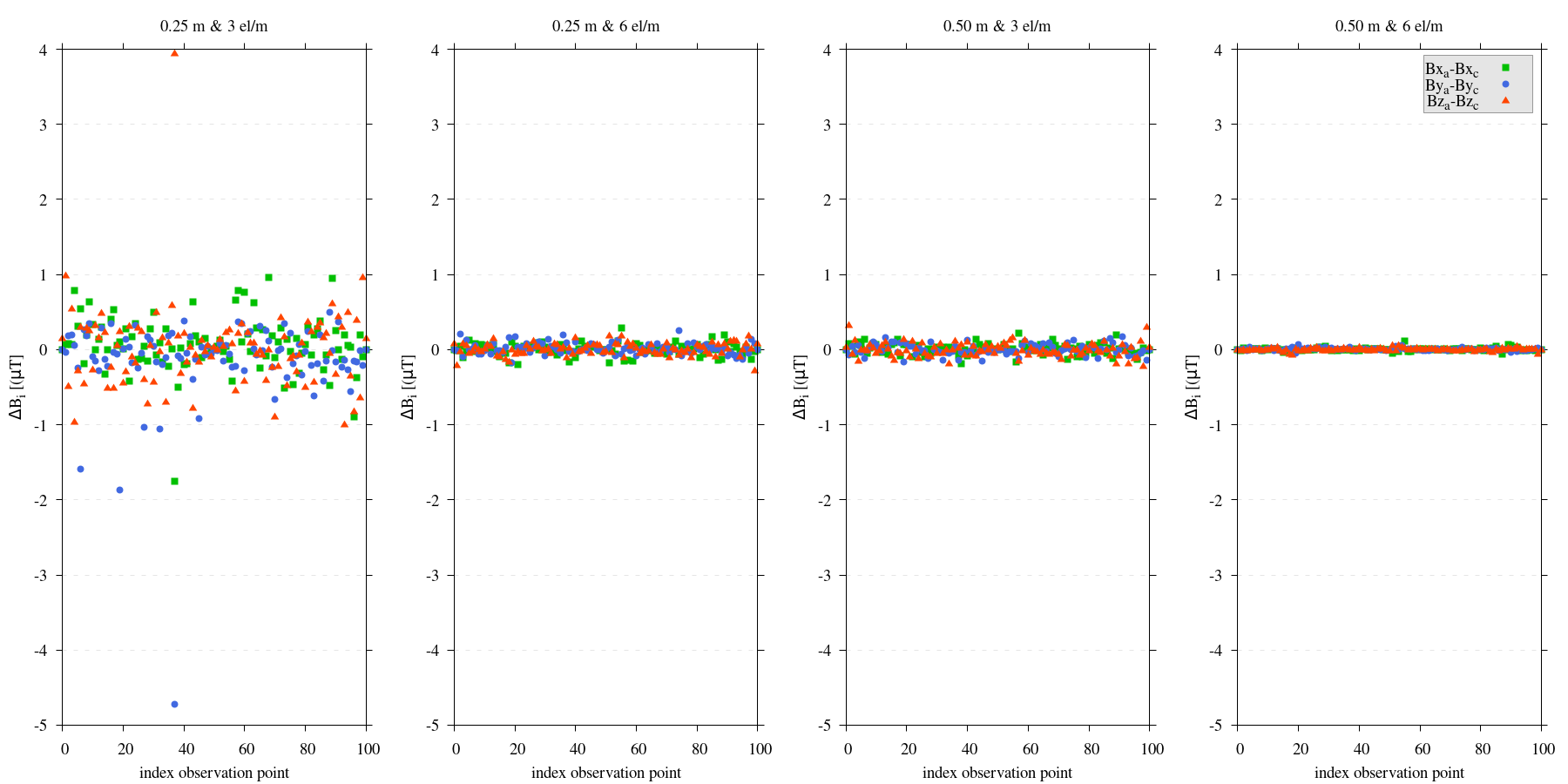
Figure 7 Comparative analysis of the analytical solution versus computed values at \(101\) distinct observation points, located either \(0.25m\) or \(0.5m\) above a sphere’s surface. The resolutions tested are \(3\) or \(6\) elements per meter (\(el/m\)). It is demonstrated that increasing the number of elements substantially reduces the discrepancy between analytical and computed values.¶
Reproduce¶
Steps to reproduce the results and figures
Please note basic setup in Installation
In
MTE.py, modify benchmark attribution to3:49benchmark = '3'Run 25cm above setup & rename/move files
170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197
if benchmark == '3': # General settings remove_zerotopo = False compute_analytical = True do_line_measurements = False do_path_measurements = False # Domain settings Lx, Ly, Lz = 20, 20, 20 nelx, nely, nelz = 60, 60, 60 # 3 el/m. #nelx, nely, nelz = 120, 120, 120 # 6 el/m. Mx0, My0, Mz0 = 0, 0, 7.5 # Sphere settings sphere_R = 10 # Do not change, or change radius_spiral as well. sphere_xc, sphere_yc, sphere_zc = Lx / 2, Ly / 2, -Lz / 2 # Spiral measurement settings do_spiral_measurements = True npts_spiral = 101 # keep odd radius_spiral = 1.025 * sphere_R # 25 cm above surface sphere. #radius_spiral = 1.05 * sphere_R # 50 cm above surface sphere. # Plane measurement settings do_plane_measurements = False plane_nnx, plane_nny = 30, 30 plane_x0, plane_y0, plane_z0 = -Lx / 2, -Ly / 2, 0.5 plane_Lx, plane_Ly = 2 * Lx, 2 * Ly
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_3/0_25_above && mv log.txt *.vtu *.ascii $_
Run 25cm above setup with double amount of elements & rename/move files
177 178 179 180 181 182 183 184 185 186 187 188 189 190 191
# Domain settings Lx, Ly, Lz = 20, 20, 20 #nelx, nely, nelz = 60, 60, 60 # 3 el/m. nelx, nely, nelz = 120, 120, 120 # 6 el/m. Mx0, My0, Mz0 = 0, 0, 7.5 # Sphere settings sphere_R = 10 # Do not change, or change radius_spiral as well. sphere_xc, sphere_yc, sphere_zc = Lx / 2, Ly / 2, -Lz / 2 # Spiral measurement settings do_spiral_measurements = True npts_spiral = 101 # keep odd radius_spiral = 1.025 * sphere_R # 25 cm above surface sphere. #radius_spiral = 1.05 * sphere_R # 50 cm above surface sphere.
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_3/0_25_2_above && mv log.txt *.vtu *.ascii $_
Run 50cm above setup & rename/move files
177 178 179 180 181 182 183 184 185 186 187 188 189 190 191
# Domain settings Lx, Ly, Lz = 20, 20, 20 nelx, nely, nelz = 60, 60, 60 # 3 el/m. #nelx, nely, nelz = 120, 120, 120 # 6 el/m. Mx0, My0, Mz0 = 0, 0, 7.5 # Sphere settings sphere_R = 10 # Do not change, or change radius_spiral as well. sphere_xc, sphere_yc, sphere_zc = Lx / 2, Ly / 2, -Lz / 2 # Spiral measurement settings do_spiral_measurements = True npts_spiral = 101 # keep odd #radius_spiral = 1.025 * sphere_R # 25 cm above surface sphere. radius_spiral = 1.05 * sphere_R # 50 cm above surface sphere.
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_3/0_5_above && mv log.txt *.vtu *.ascii $_
Run 50cm above setup with double amount of elements & rename/move files
177 178 179 180 181 182 183 184 185 186 187 188 189 190 191
# Domain settings Lx, Ly, Lz = 20, 20, 20 #nelx, nely, nelz = 60, 60, 60 # 3 el/m. nelx, nely, nelz = 120, 120, 120 # 6 el/m. Mx0, My0, Mz0 = 0, 0, 7.5 # Sphere settings sphere_R = 10 # Do not change, or change radius_spiral as well. sphere_xc, sphere_yc, sphere_zc = Lx / 2, Ly / 2, -Lz / 2 # Spiral measurement settings do_spiral_measurements = True npts_spiral = 101 # keep odd #radius_spiral = 1.025 * sphere_R # 25 cm above surface sphere. radius_spiral = 1.05 * sphere_R # 50 cm above surface sphere.
python3 -u MTE.py | tee log.txt
mkdir -p benchmarks/benchmark_3/0_5_2_above && mv log.txt *.vtu *.ascii $_
Go to directory & plot
cd benchmarks/benchmark_3
gnuplot plot_script_B3.p
python3 plot_script_B3.py
(OPTIONAL) Use paraview to visualize model setups
tee ./0_5_above/model_setup.pvsm ./0_5_2_above/model_setup.pvsm ./0_25_2_above/model_setup.pvsm ./0_25_above/model_setup.pvsm < ./model_setup.pvsm >/dev/null
paraview --state=0_5_2_above/model_setup.pvsm
paraview --state=0_5_above/model_setup.pvsm
paraview --state=0_25_above/model_setup.pvsm
paraview --state=0_25_2_above/model_setup.pvsm
Benchmark 4: a prismatic body¶
Analytical solution¶
Model setup¶
magnetostatics.compute_B_surface_integral_cuboid() would suffice. Nonetheless, to validate our proposed solution (see support.shift_observation_points_edge()) for additional singularities on diagonals of domain elements, function magnetostatics.compute_B_surface_integral_wtopo() is still utilized.Results¶
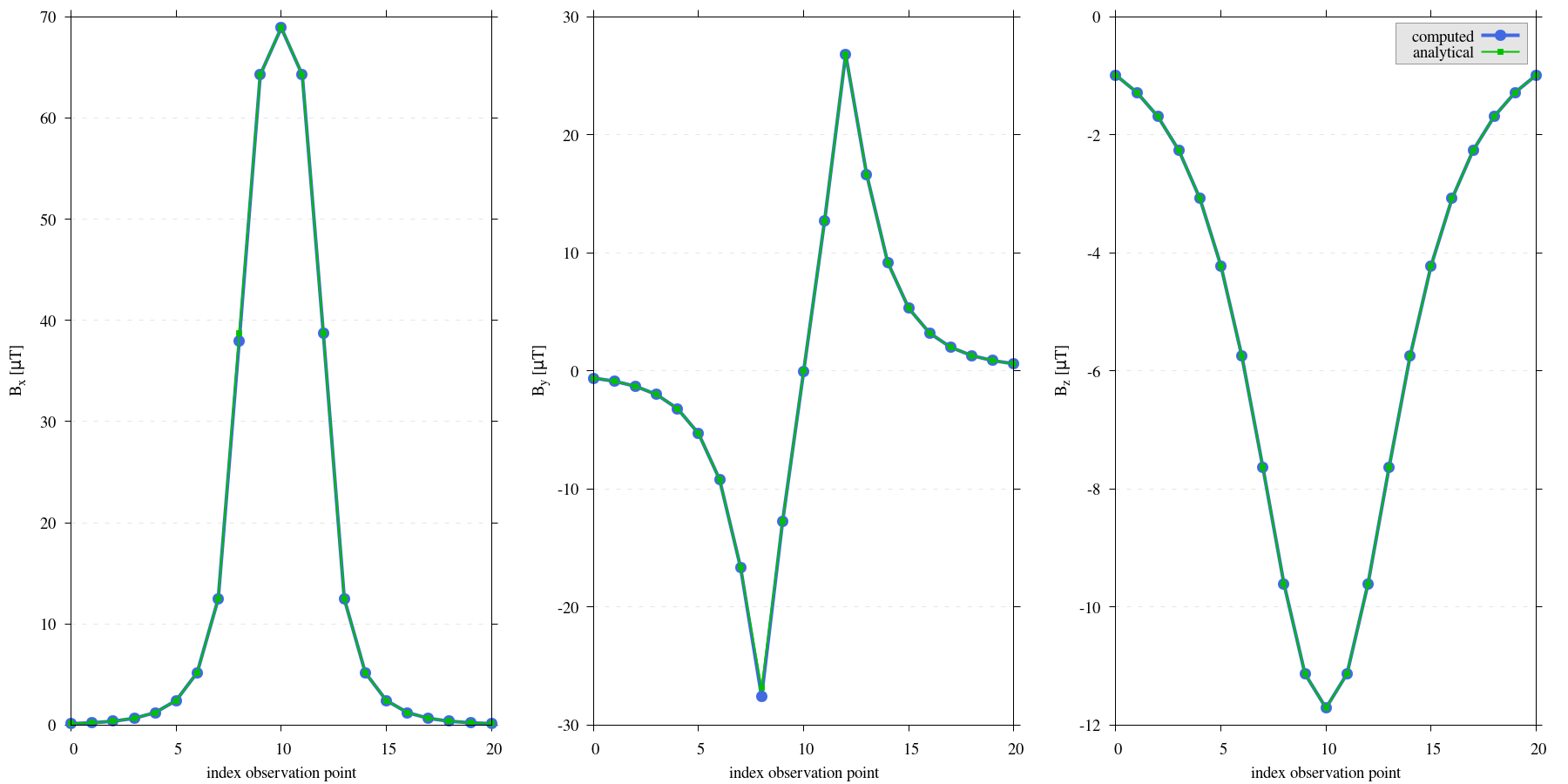
Figure 8 Comparison of magnetic field components \(\mathbf{B_x}\), \(\mathbf{B_y}\), \(\mathbf{B_z}\) for the prismatic body. As observation site location are displaced from [Ren et al., 2017], the x-axis now refers to index relating to the observation point rather than distance. The computed values of our study match those of [Ren et al., 2019].¶
Discussion¶
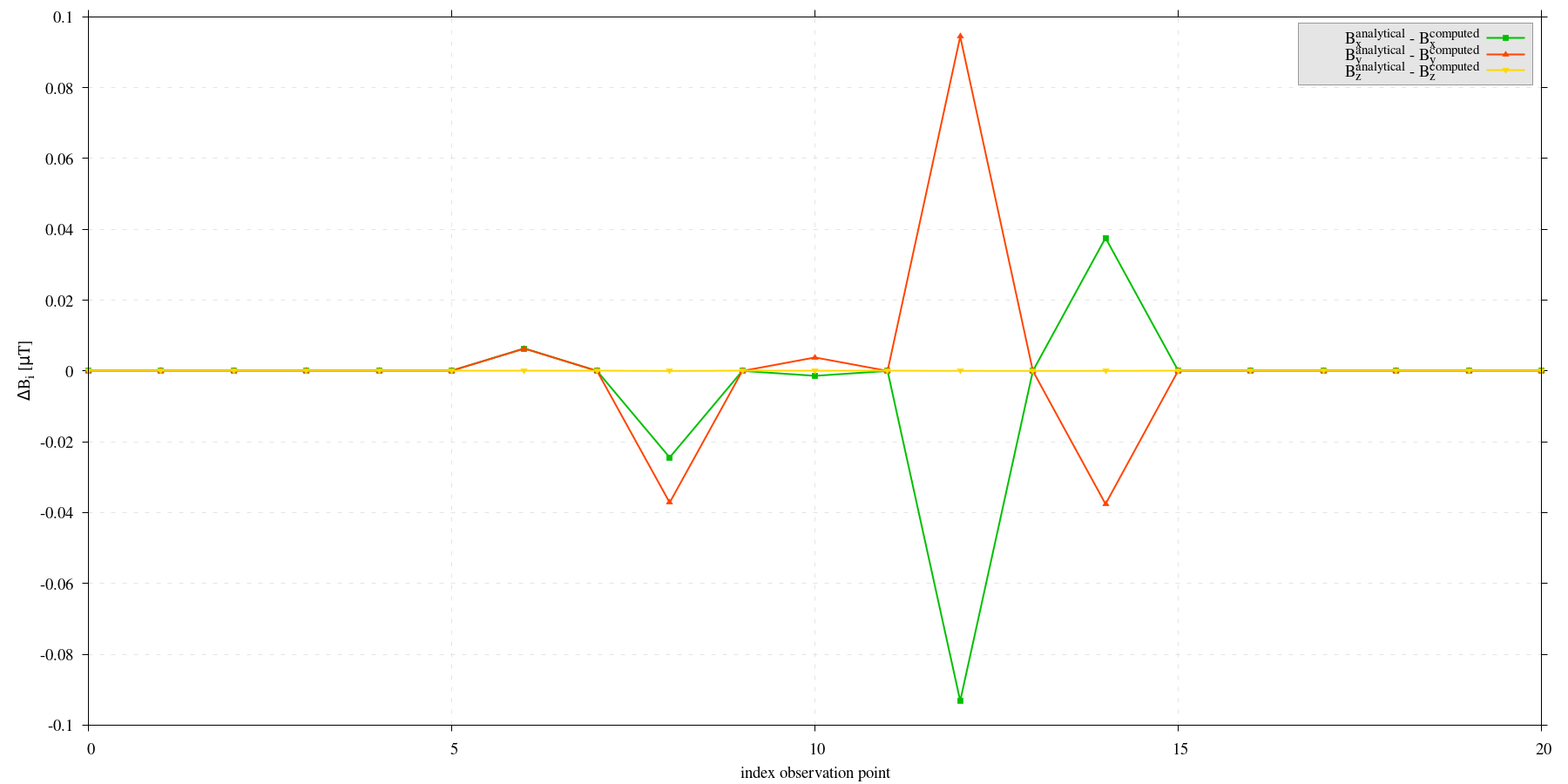
Figure 9 Comparison of magnetic field components \(\mathbf{B_x}\), \(\mathbf{B_y}\), \(\mathbf{B_z}\) for the prismatic body. As observation site location are displaced from [Ren et al., 2017], the x-axis now refers to index relating to the observation point rather than distance. The differences are small compared to the absolute values depicted in the previous graph.¶
Reproduce¶
Steps to reproduce the results and figures
Please note basic setup in Installation
In
MTE.py, modify benchmark attribution to4:49benchmark = '4'Run setup & rename/move files
201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227
if benchmark == '4': # General settings remove_zerotopo = False compute_analytical = False do_plane_measurements = False do_spiral_measurements = False do_path_measurements = False # Domain settings Lx, Ly, Lz = 10, 10, 10 nelx, nely, nelz = int(Lx), int(Ly), 10 Mx0, My0, Mz0 = 0, 0, 200 # Line measurement settings do_line_measurements = True line_nmeas = 21 xstart, xend = 6, 6 ystart, yend = -25, 25 zstart, zend = 0, 0 # Reading in values from Ren. pathfile = 'sites/B.dat' with open(pathfile, 'r') as path: lines_path = path.readlines() BxB4, ByB4, BzB4 = np.zeros((3, len(lines_path)), dtype=np.float64) # Bx, By, Bz from Ren. data = np.array([list(map(float, line.split())) for line in lines_path]) BxB4, ByB4, BzB4 = data[:, 0], data[:, 1], data[:, 2]
python3 -u MTE.py | tee log.txt
mv log.txt *.vtu *.ascii benchmarks/benchmark_4/
Go to directory & plot
cd benchmarks/benchmark_4
gnuplot plot_script_B4.p
python3 plot_script_B4.py
Note
If the resulted difference is unsatisfactory, see discussion section and repeat run to randomly generate new observation point for the model.